機械手的發(fā)展與演變:從機械執(zhí)行到智能仿生的跨越
機械手作為機器人的“操作核心”����,其發(fā)展圍繞“環(huán)境適配性、操作靈巧度、人機交互性”持續(xù)突破�,歷經(jīng)三大階段實現(xiàn)從工業(yè)工具到智能肢體的蛻變。
一�����、機械編程階段(20世紀40-70年代)
核心是“預(yù)編程的剛性執(zhí)行”���,僅能完成固定動作�����。硬件以剛性連桿和伺服電機為主�����,自由度通常僅3-6個�,缺乏外部傳感器�����,完全依賴預(yù)設(shè)軌跡運行 ���。1958年美國Unimate機械手問世���,通過液壓驅(qū)動實現(xiàn)抓取與搬運�,精度達1/10000英寸���,成為首個工業(yè)應(yīng)用機型���。代表產(chǎn)品如PUMA560機械臂,廣泛用于汽車流水線焊接��、零部件搬運等結(jié)構(gòu)化場景���,但工件位置偏移即會失效�,無環(huán)境適應(yīng)能力�。
二、閉環(huán)控制階段(20世紀80年代-21世紀初)
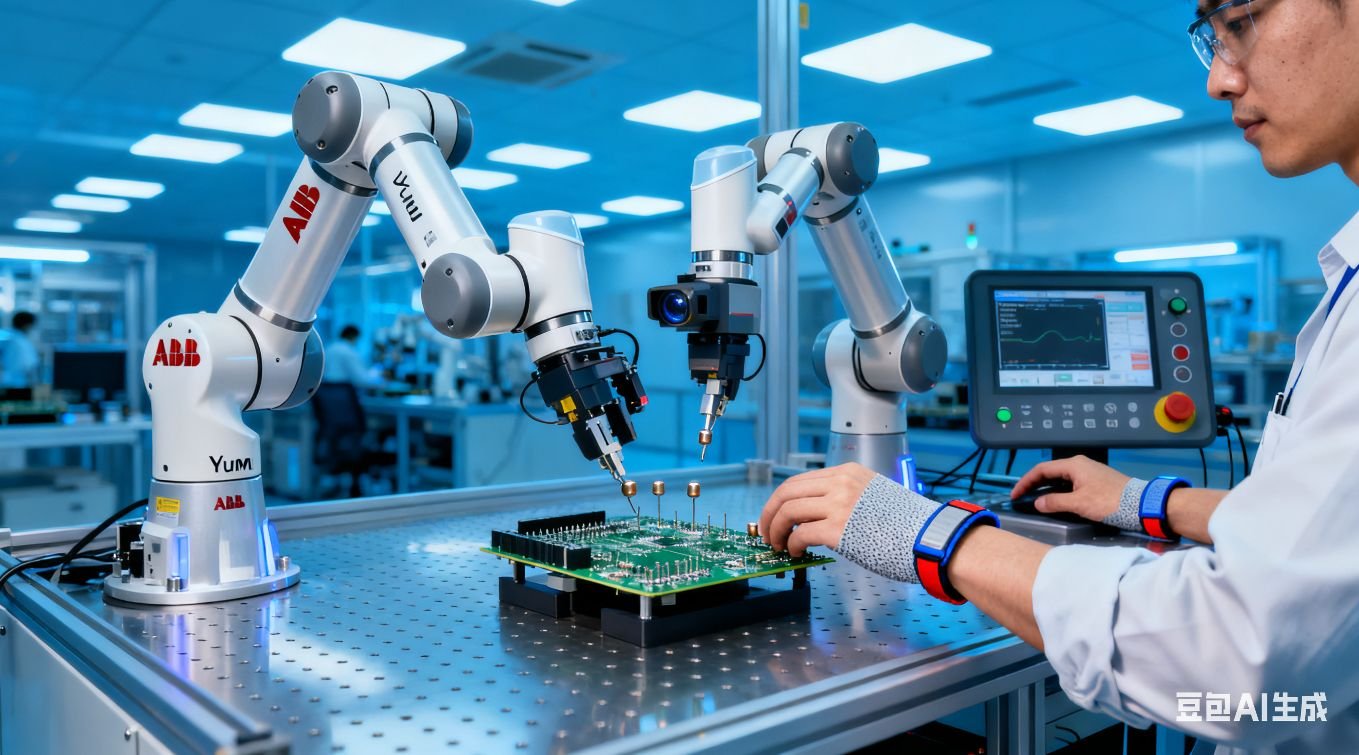
引入“感知-反饋”機制����,實現(xiàn)動態(tài)調(diào)整。硬件新增力控傳感器與視覺模塊(如“眼在手上”相機)���,通過力-位混合控制適配環(huán)境變化 。結(jié)構(gòu)趨向輕量化���,加入碰撞檢測功能�,保障人機協(xié)作安全。ABB YuMi雙臂協(xié)作機器人為典型代表����,可完成電子元件裝配、小型零件分揀���,能適應(yīng)工件位置的微小偏差�,突破了傳統(tǒng)剛性操作的局限��。

三����、具身智能階段(21世紀10年代至今)
聚焦“高適應(yīng)性與類人化”,技術(shù)呈多維度突破����。結(jié)構(gòu)上,軟體機械手以硅膠等彈性材料驅(qū)動���,可抓取雞蛋等易碎品����;連續(xù)體機械手能彎曲穿梭于狹窄空間。性能上�,中科大研發(fā)19自由度仿生手,接近人手25-27自由度的靈活度���;源升智能21自由度靈巧手可玩游戲�、擰瓶蓋�����,集成電子皮膚實現(xiàn)觸覺感知��。材料革新推動輕量化���,碳纖維���、PEEK 等替代傳統(tǒng)鋼材,英國無線仿生手更實現(xiàn)35公斤承重與防水功能 ��。

本文整合自
1. CSDN博客《靈巧手(具身智能入門十一)》(2025)
2. 抖音視頻《中科技大仿生手已接近人手靈活度》(2025)
3. 抖音視頻《高度仿生的巧手》(2025)
4. 中國工業(yè)新聞網(wǎng)《從“骨架”到“肌膚” 人形機器人“成材”之路》(2025)
5. 原創(chuàng)力文檔《機械手的發(fā)展歷程文獻綜述》(2025)
6. 抖音視頻《英國推出全球首款無線仿生機械手》(2025)
本文科普內(nèi)容與圖片均由豆包AI(2025年10月31日生成)提供支持
